


ناسا بهتازگی جزئیات تازهای از پروژه مریخنورد ارنست (Ernest) منتشر کرده است؛ نمونهای آزمایشی که میتواند راه را برای نسل جدید کاوشگرهای ماه و مریخ هموار کند. این مریخنورد نهتنها سریعتر از نمونههای فعلی حرکت میکند، بلکه قادر است چرخهای خود را بهصورت مستقل بالا ببرد و از موانع دشوار عبور کند.
🔷 مریخنورد ارنست ناسا برای ماموریتهای آینده ماه و مریخ توسعه پیدا میکند.
🔷 این نمونه آزمایشی میتواند چرخهای خود را برای عبور از موانع بلند کند.
🔷 ارنست در آزمایشهای اخیر به حداکثر سرعت حدود 0.6 مایلبرساعت رسید.
🔷 ناسا از سیستم تعلیق فعال برای افزایش تحرک و انعطافپذیری این مریخنورد استفاده میکند.
🔷 هدف پروژه، توسعه کاوشگرهایی سریعتر و مستقلتر با نیاز کمتر به کنترل از زمین است.
ارنست که نام آن مخفف عبارت Exploration Rover for Navigating Extreme Sloped Terrain است، یک نمونه آزمایشی محسوب میشود که ناسا آن را برای بررسی فناوریهای موردنیاز ماموریتهای آینده توسعه داده است.
این مریخنورد در مقایسه با مریخنوردهای فعلی ناسا طراحی متفاوتی دارد. ارنست از چهار چرخ بهره میبرد، درحالیکه مریخنوردهای کنونی مانند پرسویرنس از شش چرخ استفاده میکنند. طول نمونه فعلی حدود 1.2 متر است، اما ناسا میگوید نسخه عملیاتی احتمالی تقریباً دو برابر بزرگتر خواهد بود.
یکی از مهمترین ویژگیهای مریخنورد ارنست ناسا توانایی بالا آوردن مستقل چرخها است. این قابلیت به خودرو اجازه میدهد روی موانع قرار بگیرد یا حتی از روی آنها عبور کند.
ناسا اعلام کرده است که این مریخنورد میتواند با روشهای حرکتی متفاوتی ازجمله خزیدن، راهرفتن با چرخها و بالا رفتن از موانع حرکت کند. چنین قابلیتی میتواند عبور از مناطق سنگی، شیبهای تند و سطوح ناهموار را آسانتر کند.
مریخنوردهای ناسا از زمان سوجورنر در دهه 1990 میلادی به سیستم تعلیق غیرفعال موسوم به Rocker-Bogie متکی بودهاند. این سیستم وزن را بهصورت یکنواخت میان چرخها توزیع میکند و عملکرد قابلاعتمادی دارد.
بااینحال، مهندسان ناسا اکنون بهسراغ سیستم تعلیق فعال رفتهاند. این فناوری به ارنست اجازه میدهد موقعیت چرخها را متناسب با شرایط زمین تغییر دهد و تحرک بیشتری در مسیرهای پیچیده داشته باشد.
این مریخنورد همچنین میتواند بسته به نوع ماموریت و میزان مصرف انرژی، بین حالت تعلیق فعال و غیرفعال جابهجا شود.
ناسا آزمایشهای اخیر ارنست را در صحرای کلرادو انجام داده است. این نمونه آزمایشی طی هفت روز و در مجموع بیش از 37 ساعت حرکت کرد و حدود 16 مایل (نزدیک به 26 کیلومتر) مسیر را پیمود.
ارنست در این آزمایشها به حداکثر سرعت حدود 0.6 مایلبرساعت رسید. این رقم در مقایسه با مریخنورد پرسویرنس که حداکثر سرعت آن کمتر از 0.1 مایلبرساعت است، پیشرفت قابلتوجهی محسوب میشود.
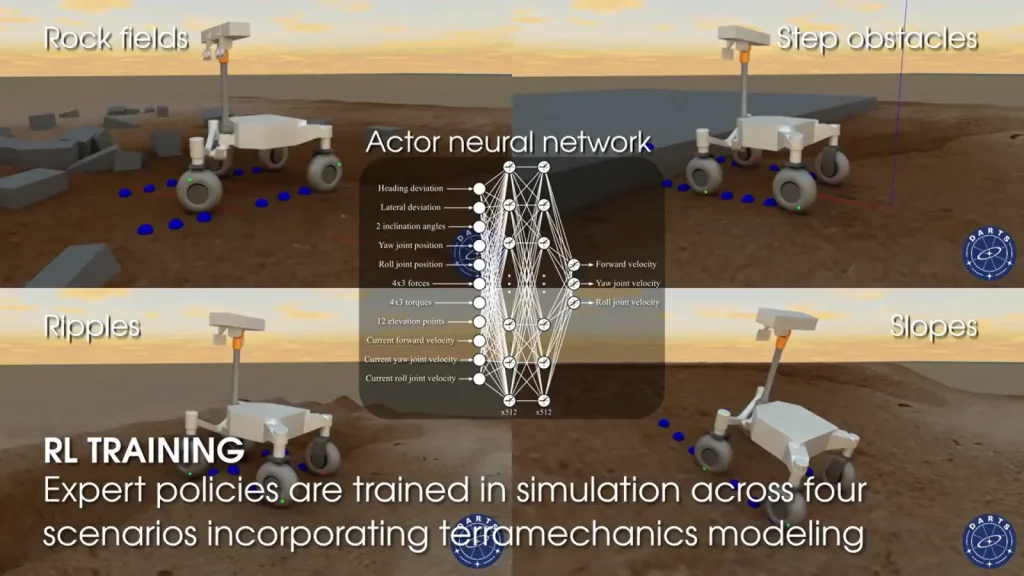
ناسا با استفاده از یادگیری تقویتی (RL)، توانایی عبور مریخنورد ارنست از شیبها و موانع پیچیده را بهبود میدهد.
جدیدترین نسخه ارنست از قابلیتهای تصمیمگیری مستقل پیشرفتهتری بهره میبرد. ناسا از زمان آغاز این پروژه در سال 2022 تاکنون چندین نمونه مختلف توسعه داده و نزدیک به 12 پیکربندی متفاوت برای سیستم تعلیق فعال را آزمایش کرده است.
هدف نهایی این پروژه، ساخت مریخنوردهایی است که بتوانند مسافتهای بیشتری را با سرعت بالاتر طی کنند و برای انجام ماموریتهای روزمره وابستگی کمتری به اپراتورهای مستقر روی زمین داشته باشند.
پروژه مریخنورد ارنست ناسا نشان میدهد آژانس فضایی آمریکا بهدنبال نسل جدیدی از کاوشگرها است که سریعتر، هوشمندتر و توانمندتر از نمونههای فعلی باشند. اگر این فناوریها به مرحله عملیاتی برسند، ماموریتهای آینده ماه و مریخ میتوانند مسافتهای بیشتری را در زمان کمتر پوشش دهند.
بهنظر شما توانایی بالا آوردن چرخها و استفاده از سیستم تعلیق فعال میتواند مهمترین تحول در طراحی مریخنوردهای آینده باشد؟


با عضویت در شبکههای اجتماعی ترنجی از آخرین اخبار فناوری باخبر شوید!


